- Hardware Manuals
- Commissioning and Tuning Guide
- Software Reference
- Resources
Power Specification SOMANET Circulo |
Circulo 7 |
Circulo 9 |
|---|---|---|
Rated supply voltage DC |
24-48 V |
|
Maximum voltage DC |
65 V |
|
Continuous phase current RMS |
8 A |
20 A |
Maximum phase current RMS (Load-cycle: 0.5s every 1.5 s) |
24 A |
60 A |
Maximum efficiency |
99 % |
|
Standby power consumption |
TBD |
|
General Specification SOMANET Circulo |
Circulo 7 |
Circulo 9 |
|
|---|---|---|---|
Supported Communication Standard |
EtherCAT |
||
Supported motors |
BLDC, PMSM |
||
Integrated safety functions |
STO/SBC according to SIL3 Pl-e |
||
Integrated Encoder 1 |
yes (optional), 20bit, absolute, multi-turn with battery |
||
Integrated Encoder 2 |
yes (optional), 20bit, absolute |
||
Supported motors |
BLDC, PMSM |
||
Hardware protections |
Overcurrent, overvoltage,undervoltage, overtemperature, PWM deadtime, PWM shoot through |
||
Dimensions (see also dimension drawings) |
Inner diameter: 20 mm, Outer diameter: 72.2 mm, height: 26.3 mm |
Inner diameter: 40 mm, Outer diameter: 92.2 mm, height: 28.5 mm |
|
Operating temperature |
TBD |
||
Storage temperature |
-35 to 85 °C |
||
Humidity |
Max 90 % rH |
||
Sensors on-board |
3 x Iphase, UDC, tMOSFET, tcore |
||
Encoder port 2 |
1 x ABZ / SSI / BiSS-C / A-Format |
||
Brake pwr. output |
1A @ 48V |
||
GPIO |
5x Digital IO (3.3/5V), 1x Digital Output (3.3/5V), 1x Digital Input (24V) 1x Analog In Single Ended (0-10V),1x Analog In Differential (±5V) |
||
Heatsink |
Aluminum |
||
Integrated encoder (motor) |
Yes, absolute (optional) |
||
Integrated encoder (joint) |
Yes, absolute (optional) |
||
Integrated brake |
Yes (optional) |
||
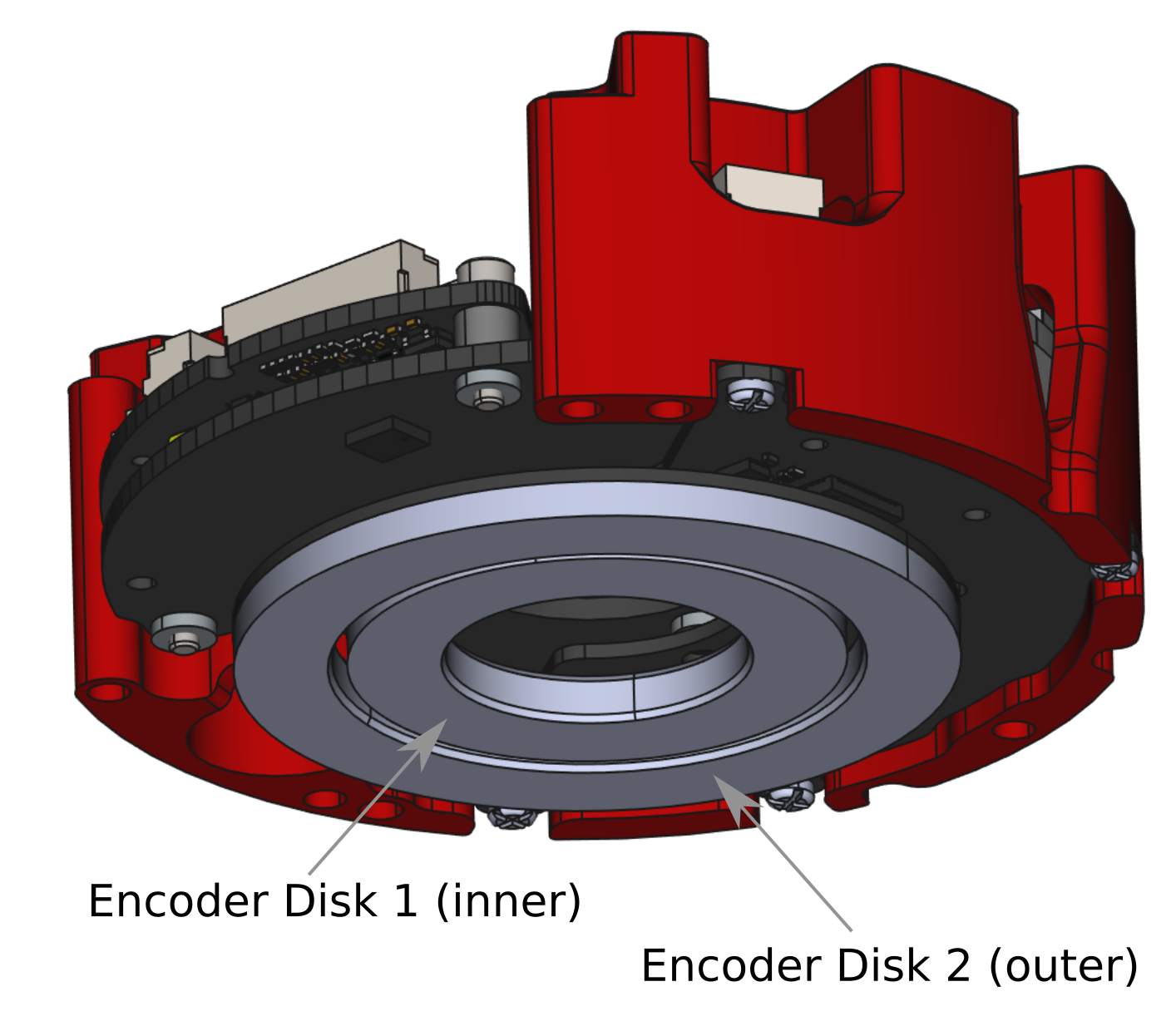
SOMANET Circulo is available in different versions:
With one additional encoder ring in two positions which is mounted on the motor for position control, velocity control and commutation.
With two additional encoder rings, one mounted on the motor for velocity control (dual loop control) and commutation and one mounted on the joint for position control.
Encoder Specifications |
Circulo 7 |
Circulo 9 |
|
|---|---|---|---|
Operating principle |
Off-axis magnetic field scanning |
||
Scanning principle |
2 arrays of Hall sensors for 2 magnetic tracks |
||
Interface |
BiSS |
||
Encoder resolution |
19 bit |
20 bit |
|
Absolute position |
On both encoders |
||
Multiturn resolution |
18 bit (battery based) |
||
Maximum speed |
12000 RPM |
6000 RPM |
|
Circulo 7
|
Circulo 7
|
Circulo 9
|
Circulo 9
|
|
|---|---|---|---|---|
Accuracy |
90” 0.025° |
72” 0.02° |
72” 0.02° |
72” 0.02° |
Repeatability |
36” 0.01° |
54” 0.015° |
36” 0.01° |
36” 0.01° |
Note
These preliminary values are the achievable accuracy and repeatability after encoder calibration.
Encoder 1 (inner) |
||
|---|---|---|
Mounted on |
Configuration 1: joint Configuration 2: motor |
|
Functions |
Configuration 1: position Configuration 2: position/velocity/commutation |
|
Encoder 2 (outer) |
||
|---|---|---|
Mounted on |
Configuration 1: motor Configuration 2: - |
|
Functions |
Configuration 1: velocity/commutation Configuration 2: - |
|
Parameter |
|
|---|---|
Magnetic field strength at the surface of the chip |
15 - 100 kA/m |
Operating magnetic field frequency |
max 7 kHz |
External magnetic field |
max 20 mT |
Brake specifications |
||
|---|---|---|
Type |
Solenoid latch |
|
Detailed specifications |
TBD |
|
