- Hardware Manuals
- Commissioning and Tuning Guide
- Software Reference
- Resources
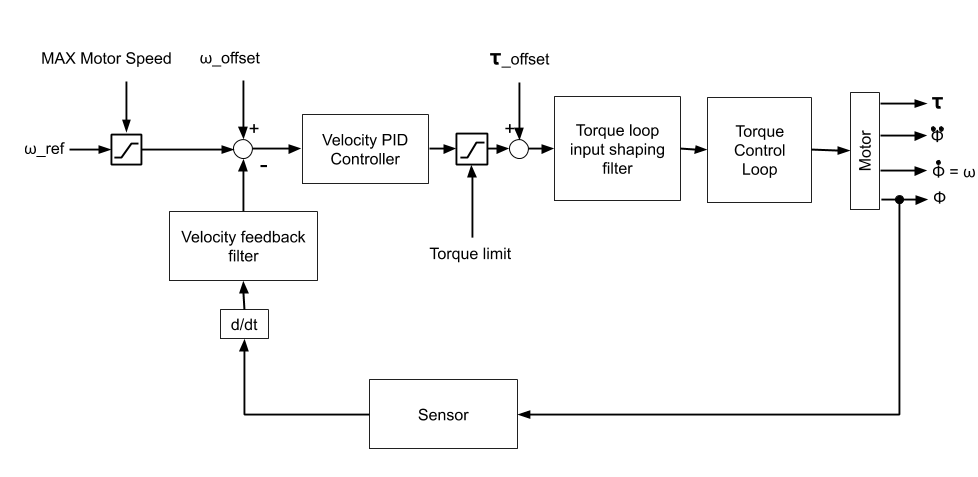
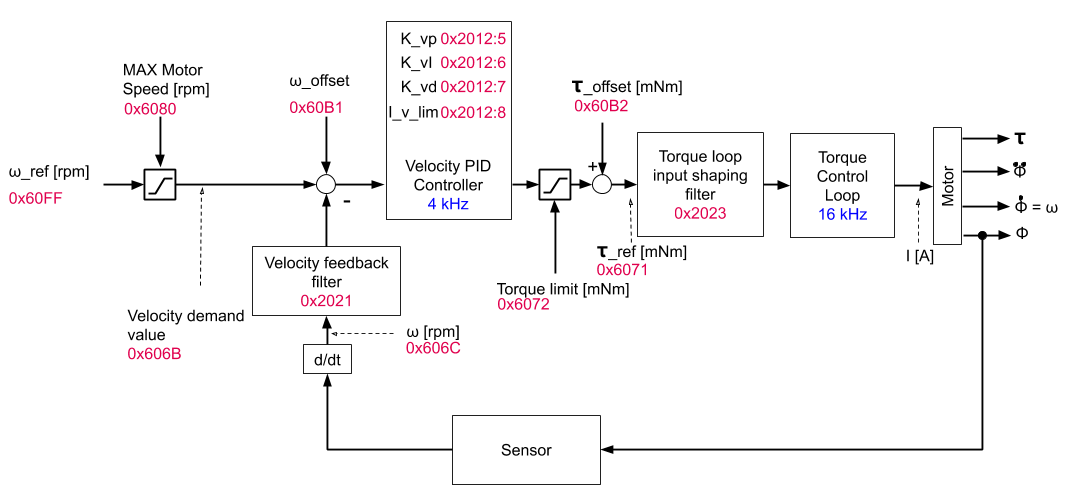
The internal structure of the velocity controller is a PID feedback structure, along with anti-windup on the integrator and low-pass filter on the velocity feedback signal to deal with the sensor noise. It is recommended to use this controller only as a PI controller (leave the D gain set to 0).
On top of the desired velocity input, the velocity controller also accepts an additional velocity offset and additionaly, a torque offset can be added to the control loop to improve the control performance. This dynamically changeable torque value will be added to the torque value generated by the velocity PI controller.
Although the cascaded position control loop also includes a velocity feedback loop, the velocity controller described here and especially its controller gains are not used as part of any position controller. This means the controller gains for the velocity controller described here (objects 0x2011:1 … 0x2011:4) and the velocity cascade being part of the position controller (objects 0x2012:5 … 0x2012:8) are set independently.
Values Kp, Ki and Kd for Torque Controller
Values Kp, Ki, Kd and Controller Integral Limit for Velocity Controller
