- Hardware Manuals
- Commissioning and Tuning Guide
- Software Reference
- Resources
Synapticon SOMANET servo drives support File Access over EtherCAT (FoE) operations, which allows a number of operations for accessing files in the drive memory such as:
Updating the firmware
Uploading a drive configuration
Note
The operation instructions are given based on a TwinCAT 3 environment. The steps are similar in other master applications.
Attention
Installing firmware to a drive is a critical operation. Using a third-party tool (like a Master) can’t provide protection mechanisms such as version or hardware validation.
Always use OBLAC Drives for drive configurations unless it’s unavoidable to use a third-party tool.
Some critical items such as version compatibility need to be thoroughly checked to avoid unexpected results such as drive failure.
If the drive is already used, updating the firmware with a third-party tool should be done only while the installed firmware and the firmware to install are checked by the Synapticon technical support team.
Factory resetting the drive before operations is recommended for safety reasons.
The master environment used for the example is TwinCAT v3.1.4024.4
The firmware used for the example is version v4.2.
The servo drive was factory reset before the operations.
The appropriate firmware package needs to be provided by the support team.
Regarding the tool/master to be used, it should support File Access over EtherCAT (FoE) access and if necessary SII/EEPROM access.
Attention
The following steps assume that the firmware has been checked for compatibility. The drive has been factory reset in this example.
Note
Make sure to first contact the technical support team for thorough check and support.
Unzip the firmware package to the expected location. After the operation it should look like Figure 1.

Figure 1: Files extracted from the firmware package¶
Switch the drive EtherCAT state to BOOT. In TwinCAT 3, the access (clicking “Bootstrap”) can be found as shown in Figure 2 together with the FOE access.
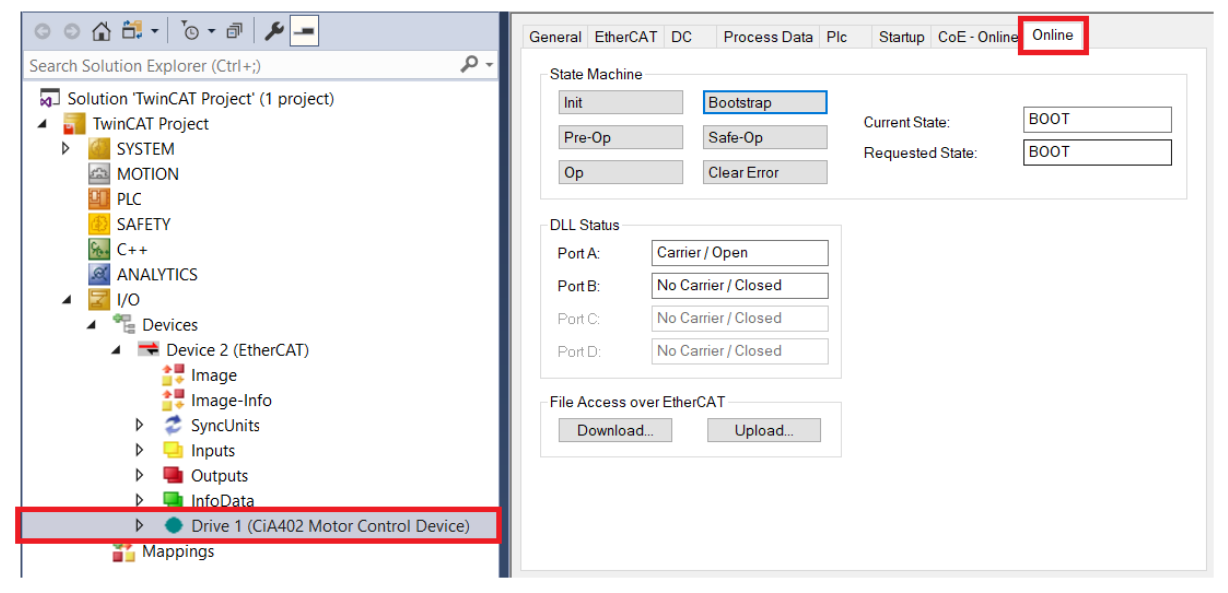
Figure 2: Accessing the slave operation in TwinCAT 3¶
In BOOT state, upload the firmware binary file to the drive memory through FOE, with the FOE name edited as “app_xyz.bin”. In TwinCAT 3 the operations are shown in Figure 3-4.
This prompts the bootloader to flash the firmware.
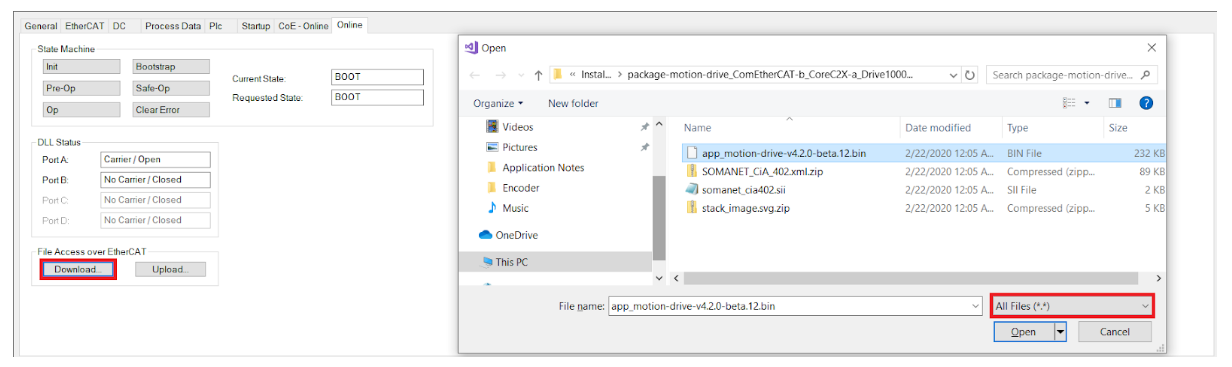
Figure 3: Choose the file to be uploaded to the slave¶
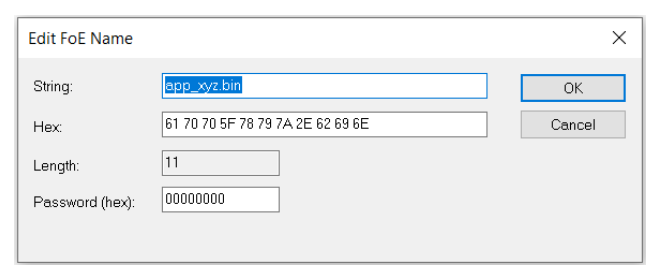
Figure 4: Edit FOE name¶
Note
If OBLAC Drives needs to be used for configuration, use the “INSTALL FIRMWARE” function and install the same firmware with OBLAC Drives to ensure further compatibility with the tools.
The master environment used for the example is TwinCAT v3.1.4024.4
The firmware used for the example is version v4.2.
Note
Please make sure that the configuration file used is compatible with the firmware version installed.
In TwinCAT 3, double-click the servo drive under “I/O” - “Devices”, as shown in Figure 5, to access the slave operations. Click the tab “Online” for state machine operations and FOE access.
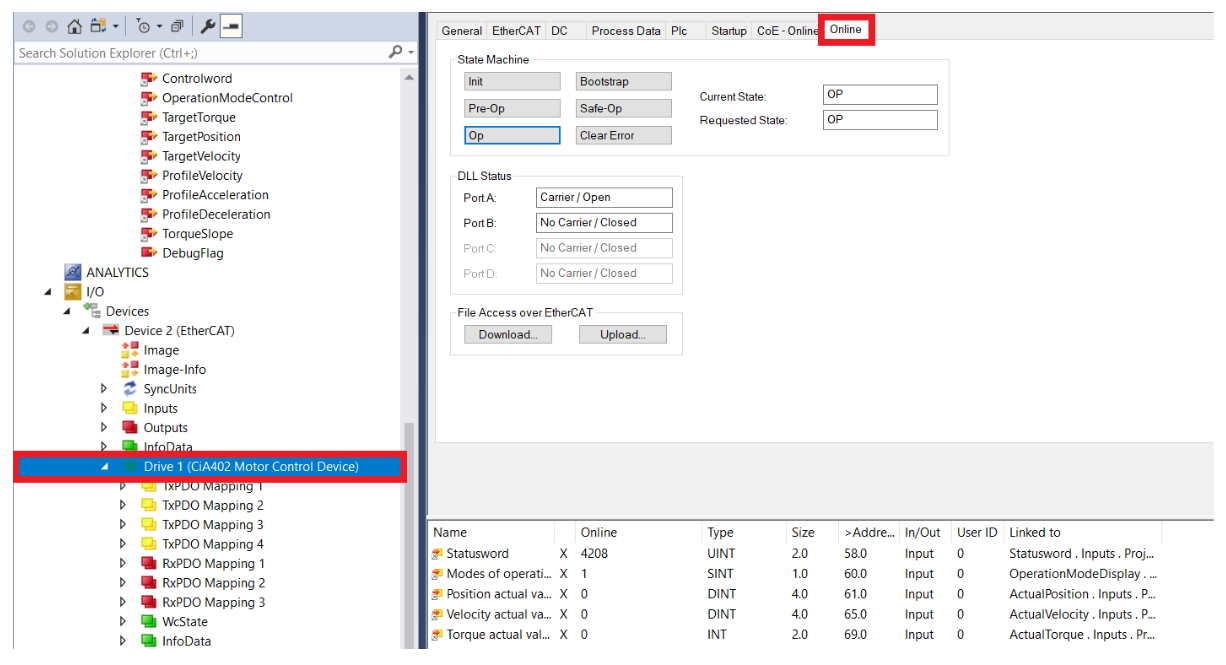
Figure 5: Accessing slave operation in TwinCAT 3¶
Switch the EtherCAT state of the drive to BOOT by clicking “Bootstrap”, this allows the following operations.
Click “Download” under “File Access over EtherCAT”, switch to browse “All Files”, and choose the configuration file to be uploaded, as shown in Figure 6.
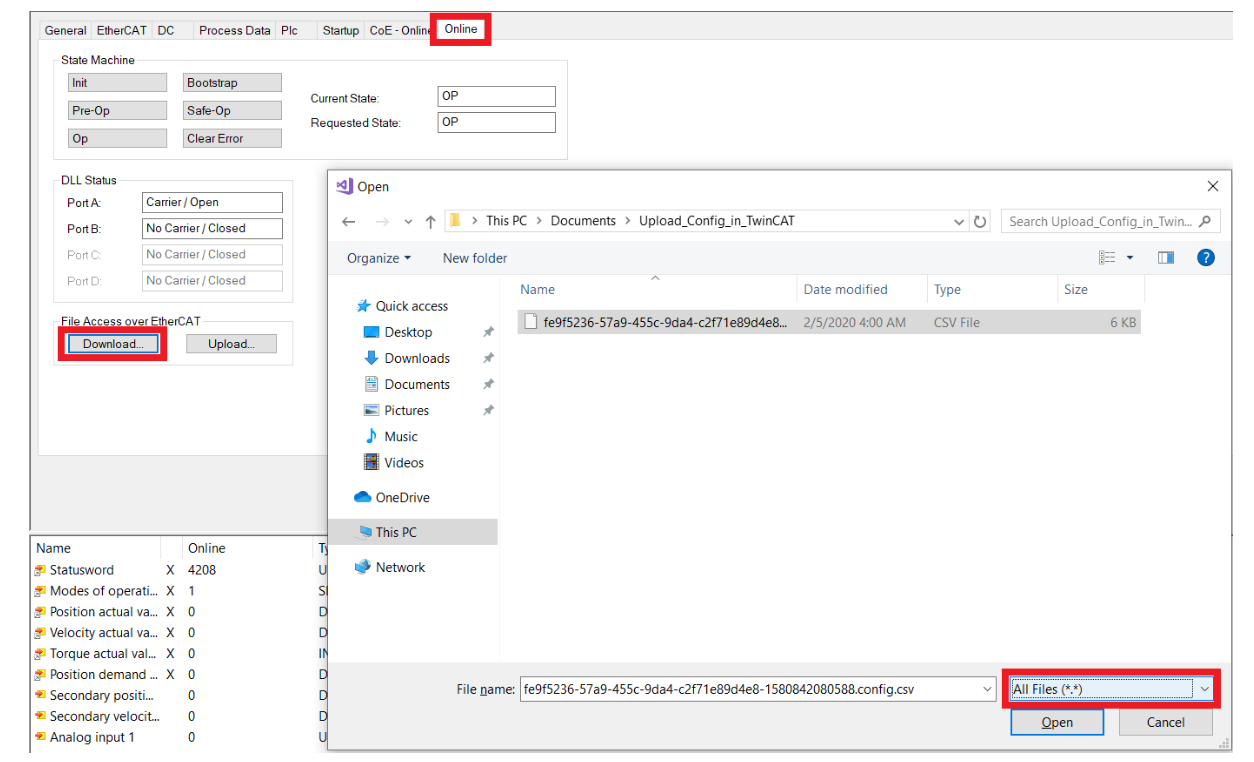
Figure 6: Choose the configuration file to be uploaded to the slave¶
Change the name to “config.csv” and click “OK” , as shown in Figure 7.
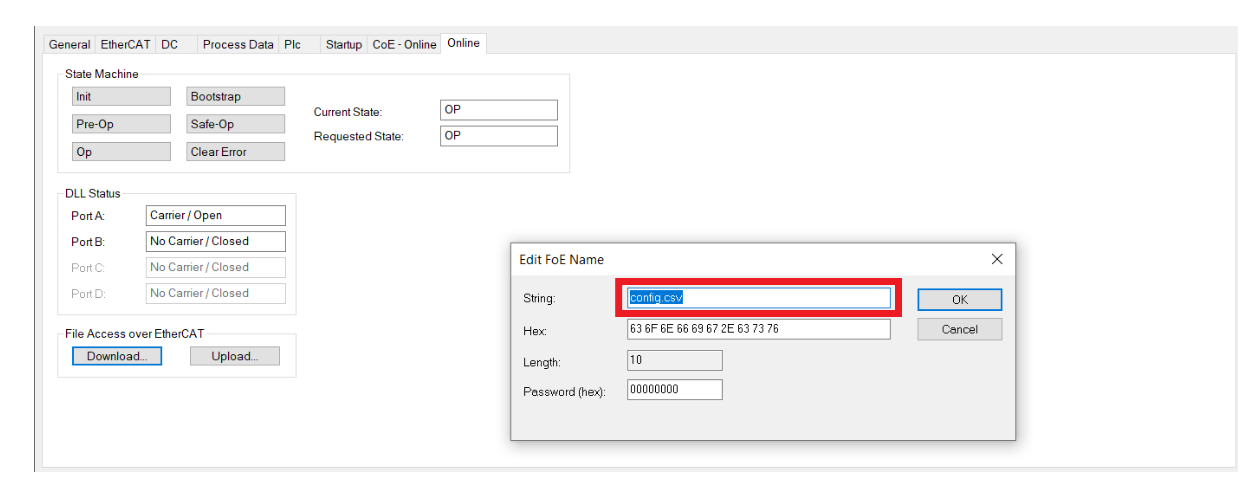
Figure 7: Edit FOE name¶
A progress bar can be seen at the bottom of the page in TwinCAT 3 after the FOE operation (see Figure 8)

Figure 8: Progress bar of TwinCAT 3¶
The configuration file is successfully uploaded and stored in the permanent storage of the servo drive. It will be used once the drive is reinitialized at the transition from BOOT to INIT (or when the drive is power-cycled).
In case resetting or power-cycling the drive is not desired, object 0x1011 (“Restore default parameters”) allows loading from the permanent storage through CANopen over EtherCAT (CoE).
Through SDO operation, read the current value of 0x1011:01 (“Restore all default parameters”). Reading a value of “1” means the procedure is ready. Write value 0x64616f6c (“daol”, “load” spelled backwards in ASCII) to 0x1011:01 to start the restore procedure.
In TwinCAT 3, this can be done in the “CoE - Online” tab.
Double-click on the object to write it, as shown in Figure 9.
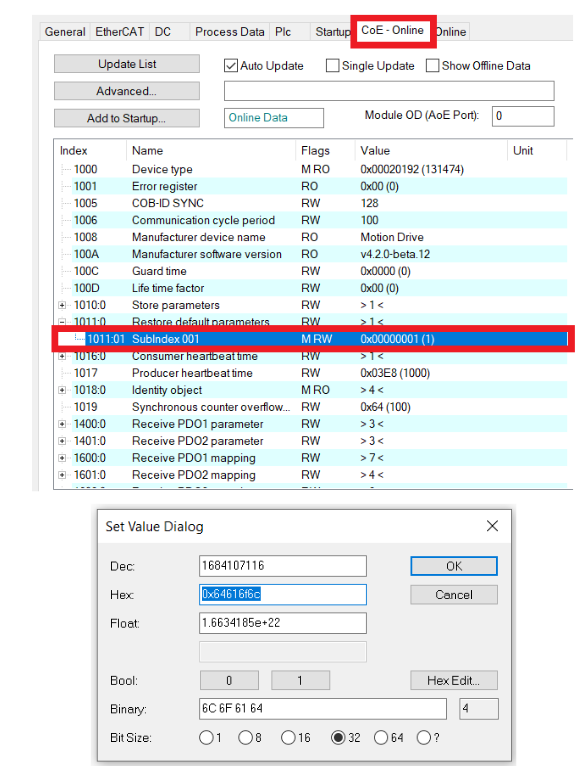
Figure 9: Restore default parameters without resetting drive¶
