- Hardware Manuals
- Commissioning and Tuning Guide
- Software Reference
- Resources
Power Specification SOMANET Circulo |
Circulo 7 |
Circulo 9 |
|
|---|---|---|---|
Nominal supply voltage DC |
24-55 V |
||
Minimum supply voltage DC * |
14 V |
||
Maximum voltage DC ** |
60 V |
||
Maximum continuous phase current RMS |
I cont,max |
8 A |
20 A |
Maximum peak phase current RMS *** |
I peak,max |
24 A |
60 A |
Maximum efficiency |
99 % |
||
Standby power consumption |
TBD |
||
* The minimal supply voltage is sufficient for configuring thr drive but will not turn a motor
** The maximum supply voltage is only for buffering peaks when braking.
*** The maximum peak current can be applied as all of the following criteria are fulfilled:
1. Duration of one peak doesn’t exceed 10 seconds2. Mounting temperature and ambient temperature within operating range3. Over any period of 90 seconds, the RMS value I RMS,90s of the current does not exceed the allowable continuous current I cont,max. In the example of the current consisting of pulses with I = I peak,max and idle phases of I = 0 between them, the maximum allowable duty cycle would be 11.1% (e.g. 10 seconds of I = I peak,max, followed by 80 seconds of I = 0). In a more general way, this requirement can be written as
General Specification SOMANET Circulo |
Circulo 7 |
Circulo 9 |
|
|---|---|---|---|
Supported Communication Standard |
EtherCAT |
||
Supported motors |
BLDC, PMSM |
||
Integrated safety functions |
STO/SBC according to SIL3 Pl-e |
||
Integrated Encoder 1 |
yes (optional), 20bit, absolute, multi-turn with battery |
||
Integrated Encoder 2 |
yes (optional), 20bit, absolute |
||
Hardware protections |
|
||
Dimensions (see also |
|
|
|
Weight (without encoder rings) |
92 g |
133 g |
|
Operating temperature |
0 … 60°C ambient air 0 … 70°C on the mounting surface (typically B-side / bearing flange of the motor) |
||
Storage temperature |
-35 to 85°C |
||
Humidity |
Max 90 % rH |
||
Sensors on-board |
|
||
Encoder port 1 |
1 x BiSS-C / SSI |
||
Encoder port 2 |
1 x ABZ / SSI / BiSS-C / A-Format |
||
Brake power output |
1A @ 48V |
||
Brake peak current |
4A |
||
Digital I/O |
|
||
Analog In |
|
||
Motor temperature sensor input (user configurable) |
1 x KTY (for example KTY84-130) / PT1000 / PT100 1 |
||
Heatsink |
Aluminum |
||
Integrated brake |
Yes (optional) |
||
Using a PT100 is not recommended. Click here for details about temperature sensors
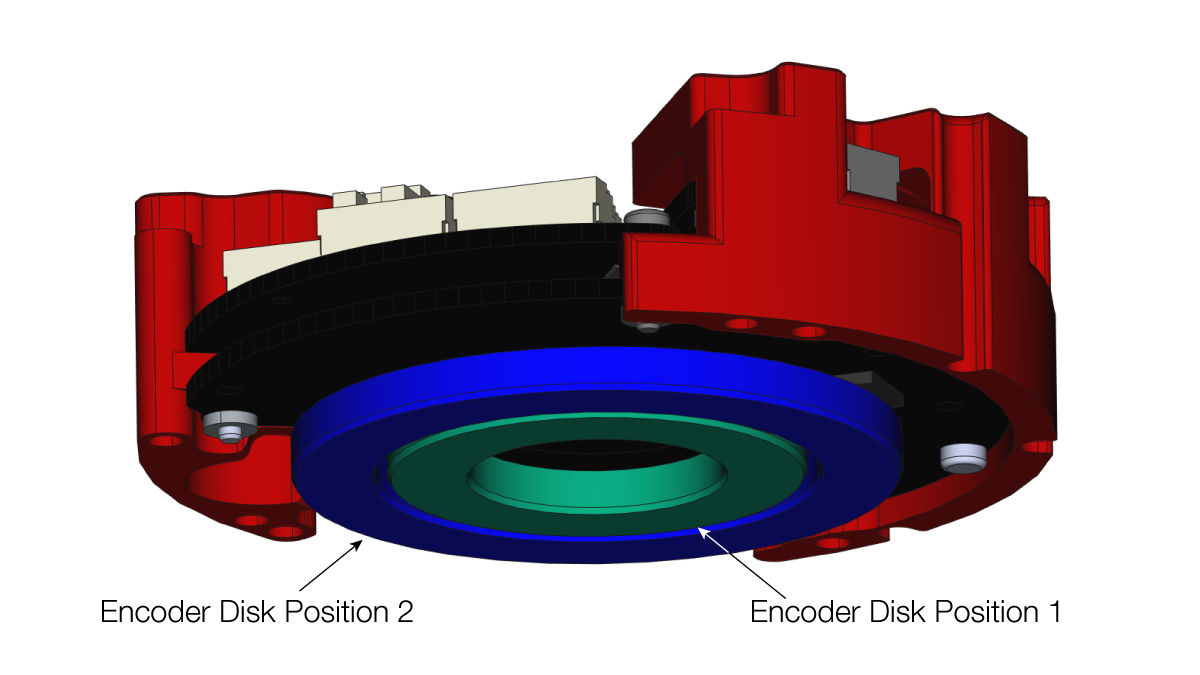
SOMANET Circulo is available in different versions:
With one additional encoder ring in two positions which is mounted on the motor for position control, velocity control and commutation.
With two additional encoder rings, one mounted on the motor for velocity control (dual loop control) and commutation and one mounted on the joint for position control.
Attention
Encoder Specifications |
Encoder Position 1 |
Encoder Position 2 |
|---|---|---|
Operating principle |
Off-axis magnetic field scanning |
|
Scanning principle |
2 arrays of Hall sensors for 2 magnetic tracks |
|
Interface |
BiSS |
|
Encoder resolution |
19 bit |
|
Absolute position |
On both encoders |
|
Multiturn resolution |
18 bit (battery based) |
|
Maximum speed |
12000 RPM |
|
Encoder Specifications |
Encoder Position 1 |
Encoder Position 2 |
|---|---|---|
Operating principle |
Off-axis magnetic field scanning |
|
Scanning principle |
2 arrays of Hall sensors for 2 magnetic tracks |
|
Interface |
BiSS |
|
Encoder resolution |
20 bit |
|
Absolute position |
On both encoders |
|
Multiturn resolution |
18 bit (battery based) |
|
Maximum speed |
6000 RPM |
|
Accuracy / repeatability |
Encoder Position 1 |
Encoder Position 2 |
|---|---|---|
Accuracy |
±90” ±0.025° |
±72” ±0.02° |
Repeatability |
±14” ±0.0039° |
±25” ±0.0069° |
Note
These preliminary values are the achievable accuracy and repeatability after encoder calibration.
Accuracy / repeatability |
Encoder Position 1 |
Encoder Position 2 |
|---|---|---|
Accuracy |
±72” ±0.02° |
±72” ±0.02° |
Repeatability |
±8” ±0.0022° |
±13” ±0.0036° |
Note
These preliminary values are the achievable accuracy and repeatability after encoder calibration.
Encoder Position 1 |
|
|---|---|
Mounted on |
Configuration 1: joint Configuration 2: motor |
Functions |
Configuration 1: position Configuration 2: position/velocity/commutation |
Encoder Position 2 |
|
|---|---|
Mounted on |
Configuration 1: motor Configuration 2: - |
Functions |
Configuration 1: velocity/commutation Configuration 2: - |
Parameter |
|
|---|---|
Magnetic field strength at the surface of the chip |
15 - 100 kA/m |
Operating magnetic field frequency |
max 7 kHz |
External magnetic field |
max 20 mT |
Brake specifications |
||
|---|---|---|
Type |
Solenoid latch |
|
Detailed specifications |
TBD |
|
SOMANET Circulo is available in different variants.
For making a purchase or request please include the MPN according to the following table:
Product Designation |
Option |
MPN |
Product Catalog Name* |
|---|---|---|---|
SOMANET Circulo 7 |
Standard |
CR7-48-24-ECNN |
SOMANET Circulo 7 (CR7-48-24-ECNN) |
Single Encoder Position 1 |
CR7-48-24-ECAN |
SOMANET Circulo 7 (CR7-48-24-ECAN) |
|
Single Encoder Position 2 |
CR7-48-24-ECBN |
SOMANET Circulo 7 (CR7-48-24-ECBN) |
|
Dual Encoder |
CR7-48-24-ECDN |
SOMANET Circulo 7 (CR7-48-24-ECDN) |
|
SOMANET Circulo 9 |
Standard |
CR9-48-60-ECNN |
SOMANET Circulo 9 (CR9-48-60-ECNN) |
Single Encoder Position 1 |
CR9-48-60-ECAN |
SOMANET Circulo 9 (CR9-48-60-ECAN) |
|
Single Encoder Position 2 |
CR9-48-60-ECBN |
SOMANET Circulo 9 (CR9-48-60-ECBN) |
|
Dual Encoder |
CR9-48-60-ECNN |
SOMANET Circulo 9 (CR9-48-60-ECNN) |
* this name will appear in your order confirmation and invoice.

