- Hardware Manuals
- Commissioning and Tuning Guide
- Software Reference
- Resources
In profile velocity mode the drive accelerates until the demand velocity value has been reached and keeps this velocity.
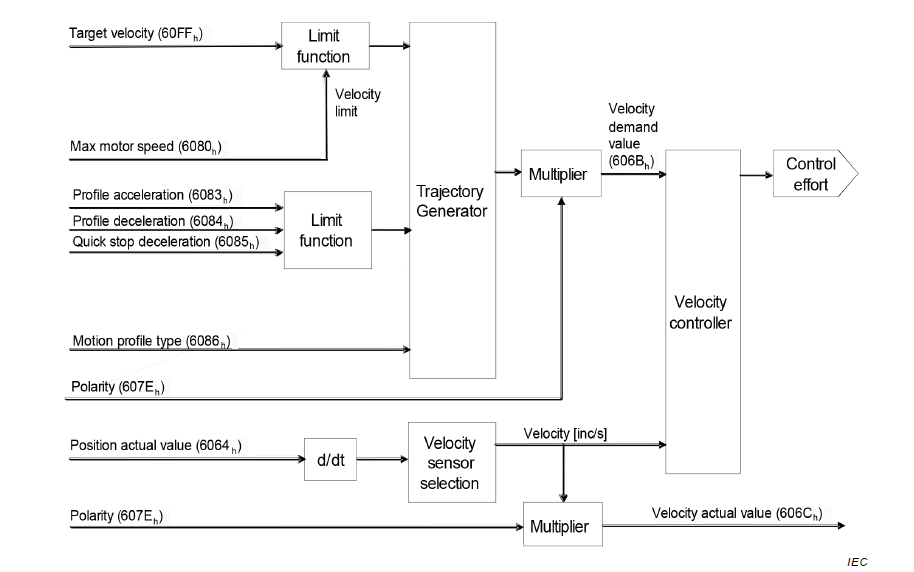
The following objects need to be configured for the velocity profile:
* This object is automatically detected and configured by Commutation Offset Detection.
The motion in Profile velocity mode is toggled by the halt bit (8) in the controlword (object 0x6040):
Value 0: Motion is executed, the drives accelerates (with the specified Profile acceleration) until either
the velocity is reached or
halt bit is set to 1
Value 1: Motion is stopped, the drive decelerates (with the specified Profile deceleration) until either
velocity = 0 or
halt bit is reset to 0
Attention
When the drive mode is set to Profile velocity mode and the halt bit is unset, the motor will start turning immediately.
To enable the mode, the value 3 (0003h) must be entered in object 0x6060. The Op mode display 0x6061 can be used to check if the op mode has been set correctly.
The profile velocity mode uses some bits of the controlword for mode specific purposes which are indicated in yellow. The figure shows the structure of the controlword. For the general structure and usage, please refer to our Application note on Status- and Controlword.
| 15-9 | 8 | 7-4 | 3-0 | |||||
|---|---|---|---|---|---|---|---|---|
| N/A | Halt | N/A | basic | |||||
The mode specific bits of the statusword can be used to monitor the performance of the operation. For further information please refer to the section on Control Supervision.
Objects related to bits 10 and 12 of the statusword:
| 5-13 | 12 | 11 | 10 | 9-8 | 7-0 | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| N/A | Speed bit | Internal limit active | Target reached | N/A | basic | |||||
Internal limit active:
Target reached: The bit is set if the actual velocity stays in the window of target velocity ± velocity window for a duration of Velocity window time.
Speedbit:The speed bit is set to 1 when the actual velocity goes below the velocity threshold (meaning the motor is in standstill).
The bit will be 0 when the actual velocity exceeds the velocity threshold of the speedbit for a duration of Velocity threshold time (meaning the motor is rotating).
Note
If the velocity window is 0xFFFF, velocity window monitoring will be switched off and the target reached bit will always be 0.
