- Hardware Manuals
- Commissioning and Tuning Guide
- Software Reference
- Resources
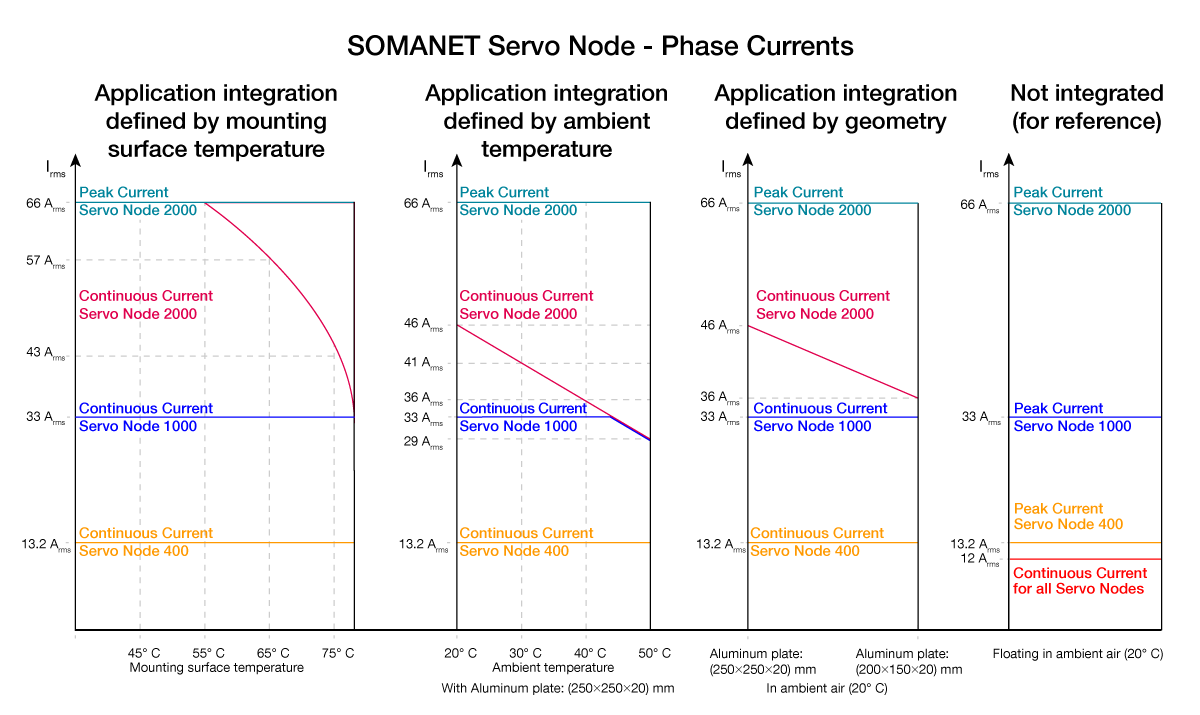
While the maximum peak current is a fixed property of a servo drive, the maximum continuous output current is highly dependent on its thermal integration into the surrounding system. The boundary conditions described below are idealized scenarios that can be described and defined clearly. In most cases they will not represent the real-world application exactly, as the geometric and thermodynamic situation in a robot or other application is typically more complex. The purpose of these exemplary scenarios is to provide the system designer with an estimation of the required cooling capacity of the structure surrounding the SOMANET servo drive.
Application integration defined by interface temperature
In this scenario, the servo drive is assumed to be integrated into a structure that is cooled externally to a defined maximum temperature. The defined continuous currents are achievable as long as the drive is bolted to a metal structure using all 4 M3 screws, the entire red aluminum bottom is in contact with the structure and all of the contact surface cooled to no hotter than the temperature specified in the figure below. This way of specification is the most accurate one and can directly be used in the design process of the system.
Application integration on a sample plate in air *
2.a Application Integration Defined by Ambient Temperature
In this scenario, the servo drive is mounted to a geometrically defined structure. As “real-world structures” are typically too complex to reflect them here, a simple geometry (rectangular aluminum plate of 250 x 250 x 20 mm) was selected. The drive is bolted to the center of a metal plate of such geometry using all 4 M3 screws, the plate is mounted vertical and the rest of the metal plate is surrounded by ambient air. Depending on the temperature of the ambient air, the continuous currents specified in the figure are achievable. It will be subject to free convection cooling. The available continuous currents can be further increased when adding active cooling (fan).
2.b Application Integration Defined by Geometry
As in the scenario above, the drive is mounted to the center of a vertical aluminum plate. Here, a fixed ambient temperature (20°c) is assumed, but different sizes of the plate are considered. Depending on the size of the plate, the continuous currents specified in the figure are achievable. The available continuous currents can be further increased when adding active cooling (fan).
Servo drive floating in ambient air
This is a reference value when not integrating the node into any structure. As SOMANET servo drives are designed as embedded products, this situation is not recommended for both thermal and mechanical reasons!
Attention
A similarly bad cooling situation will be created if the node is mounted to a structure with poor thermal conductivity, in particular structures made of plastic.
* The continuous phase current given in the specsheet provided by Synapticon assumes this kind of boundary condition with a 200 x 150 x 20 mm aluminum mounting plate.