- Hardware Manuals
- Commissioning and Tuning Guide
- Software Reference
- Resources
The default unit for all velocity and speed data is rpm
The default unit for all acceleration and deceleration data is rpm/s
In the case that the application requires a higher precision in velocity, the unit can be configured by the user through object 0x60A9 SI unit velocity.
Supported values are:
1 rpm (default value)
0.1 rpm
0.01 rpm
0.001 rpm
Attention
As soon as this object is changed, all related objects and subitems also use the chosen unit and must be scaled accordingly. Unexpected behavior and accidents can occur if the chosen unit is not taken into account. For more information please refer to “Objects affected by changes of the velocity unit”.
To configure the velocity unit write the following values through SDO to object 0x60A9 SI unit velocity:
1 rpm (value 0x00B44700 or 0d11814656) - default
0.1 rpm (value 0xFFB44700 or 0d4290004736)
0.01 rpm (value 0xFEB44700 or 0d4273227520)
0.001 rpm (value 0xFDB44700 or 0d4256450304)
Since version 19.1.0 of OBLAC Drives this can be done directly in the UI using Quick Open:
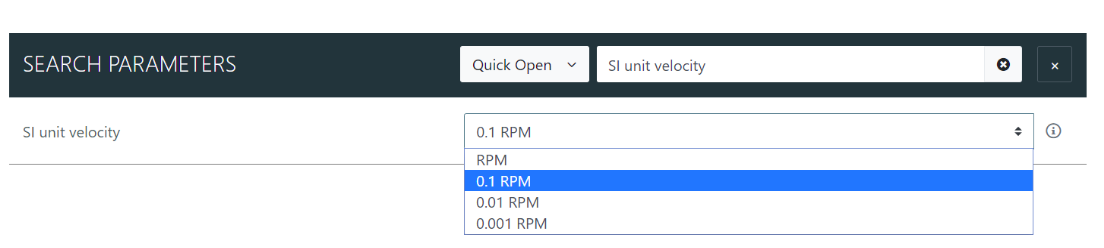
After changing the unit please change all speeds /acceleration objects according to the new precision (see section below for details).
Click on “save to device” to keep the configuration.
0x606B Velocity demand value
0x606C Velocity actual value
0x606D Velocity window
0x606F Velocity threshold
0x6080 Max motor speed
0x6081 Profile velocity
0x6083 Profile acceleration
0x6084 Profile deceleration
0x6085 Quick stop deceleration
0x609A Homing acceleration
0x60B1 Velocity offset
0x60FA Control effort
0x60FF Target velocity
0x230B Secondary velocity value
These subitems are also affected by the value:
0x6099:1 Homing speeds: Speed during search for switch
0x6099:2 Homing speeds: Speed during search for zero
0x2013:2 Gain scheduling: Threshold velocity 0
0x2013:11 Gain scheduling: Threshold velocity 1
When a dual-sensor setup is used with one encoder mounted after a reducer with a gear ratio of 1:100 the default velocity unit rpm causes severe inaccuracy in the motion control.
In OBLAC Drives choose 0.001 RPM for SI unit velocity.
When using a version of OBLAC Drives before 19.1.0, manually write 0d4256450304 to object 0x60A9 SI unit velocity through SDO. The terminal of OBLAC Drives can be used for this operation with the following code line:
ethercat download -p0 0x60A9 4256450304
In OBLAC Drives, accordingly scale the related data:
Data commonly used:
0x6080 Max motor speed
0x6085 Quick stop deceleration
When using homing functions
0x609A Homing acceleration
0x6099:1 Speed during search for switch
0x6099:2 Speed during search for zero
When using gain scheduling for PID controller
0x2013:2 Threshold velocity 0
0x2013:11Threshold velocity 1
When using field weakening
0x2010:6 Field weakening starting speed
0x2010:7 Field weakening ending speed
When using velocity supervision
0x606D Velocity window
When using a self-defined threshold for zero velocity
0x606F Velocity threshold
In OBLAC Drives, click “SAVE TO DEVICE” to save the configuration to the drive permanently.
In the master, accordingly read / write the data with the new unit 0.001 rpm
0x60FF Target velocity
0x606B Velocity demand value
0x606C Velocity actual value
0x60B1 Velocity offset
0x60FA Control effort
0x230B Secondary velocity value
0x6081 Profile velocity
0x6083 Profile acceleration
0x6084 Profile deceleration
This object defines the velocity value
Output of position controller in position mode/trajectory generator in velocity mode.
Provides the value read at the velocity sensor (or the derivation of the position signal).
This value reflects each side of the target velocity.
Configures the velocity that is considered zero velocity.
Sets the maximum allowed speed for the motor in either direction.
Configures the velocity target for the end of the acceleration ramp during profiled motion.
Configures the acceleration used during profiled motion.
Configures the deceleration used during profiled motion.
0x6085 Quick stop deceleration
Deceleration used for stopping the motor when quick stop function is activated.
Configures the acceleration and deceleration to be used during a homing operation.
Sets a feed-forward velocity as input to the velocity controller.
Provides a measure of the control effort (the output of the position control loop).
Sets the target velocity and will be used as input to the trajectory generator.
0x230B Secondary velocity value
Calculated velocity value of encoder configured as “Feedback display only”.
