- Hardware Manuals
- Commissioning and Tuning Guide
- Software Reference
- Resources
Tuning the parameters of velocity controller is pretty straight forward. In this section, the basic steps of tuning the velocity controller are explained.
The constants kP, kI, and kD should be between 0 and 10 with the precision of 6-digit floating point.
Measuring units of gains are: kP [mNm/rpm],
kI [mNm/(rpm*s]
kD [mNm*s/rpm]
To find the proper values of PID constants of velocity controller the following steps are recommended:
Check if all constants kP, kI, and kD are set to 0. After that activate the velocity controller. By default, the integral limit of velocity controller should be set to the maximum torque of selected motor in [milli-Nm].
Set the reference velocity to 50% of rated motor velocity [rpm].
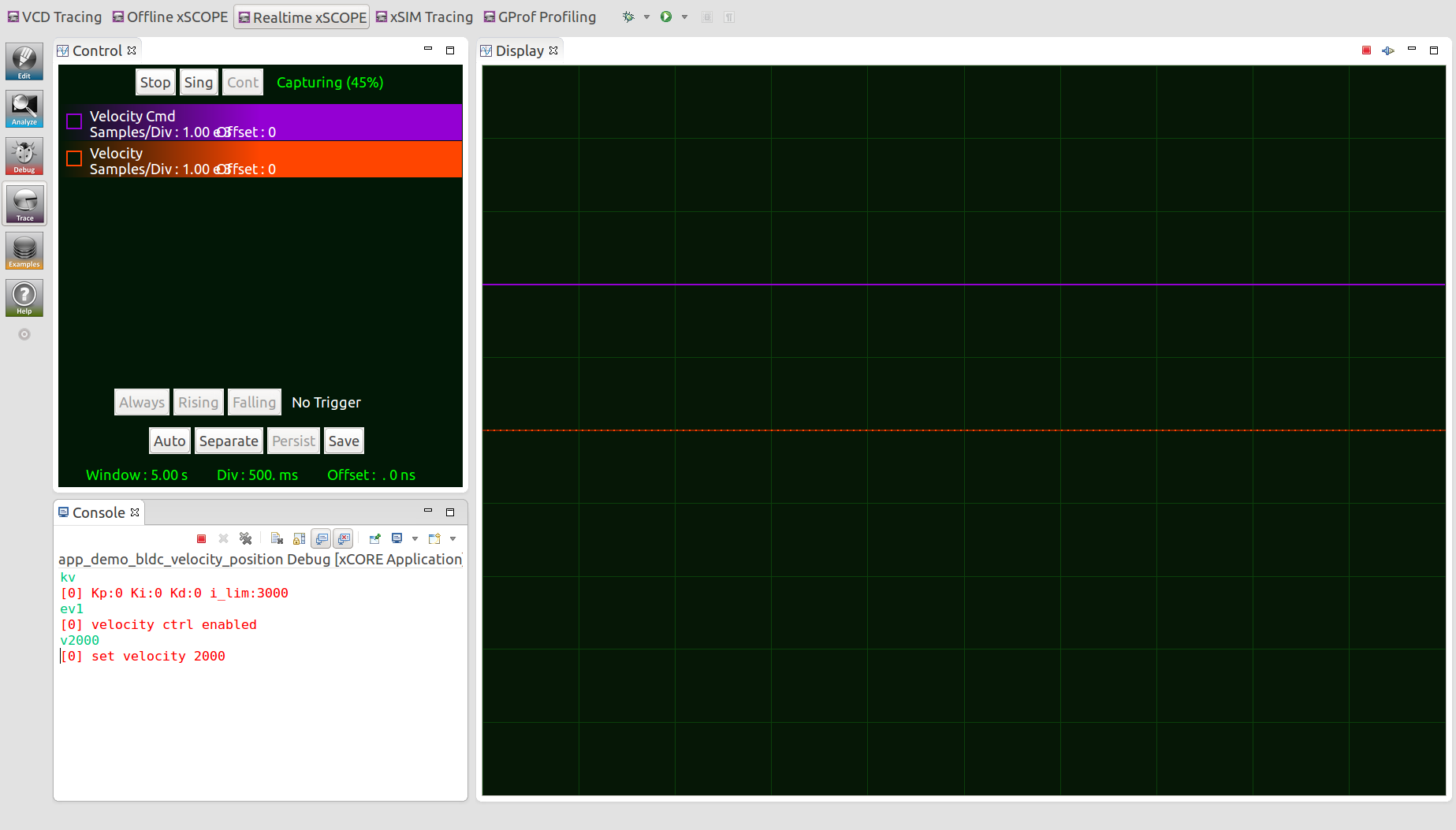
Fig. 1: setting the reference value of velocity to 50% of its rated value¶
Increase kP until the measured speed is around 70% of the reference speed. As a suggestion start with kP equal to 0.1, and in each step increase kP with a factor of 2.
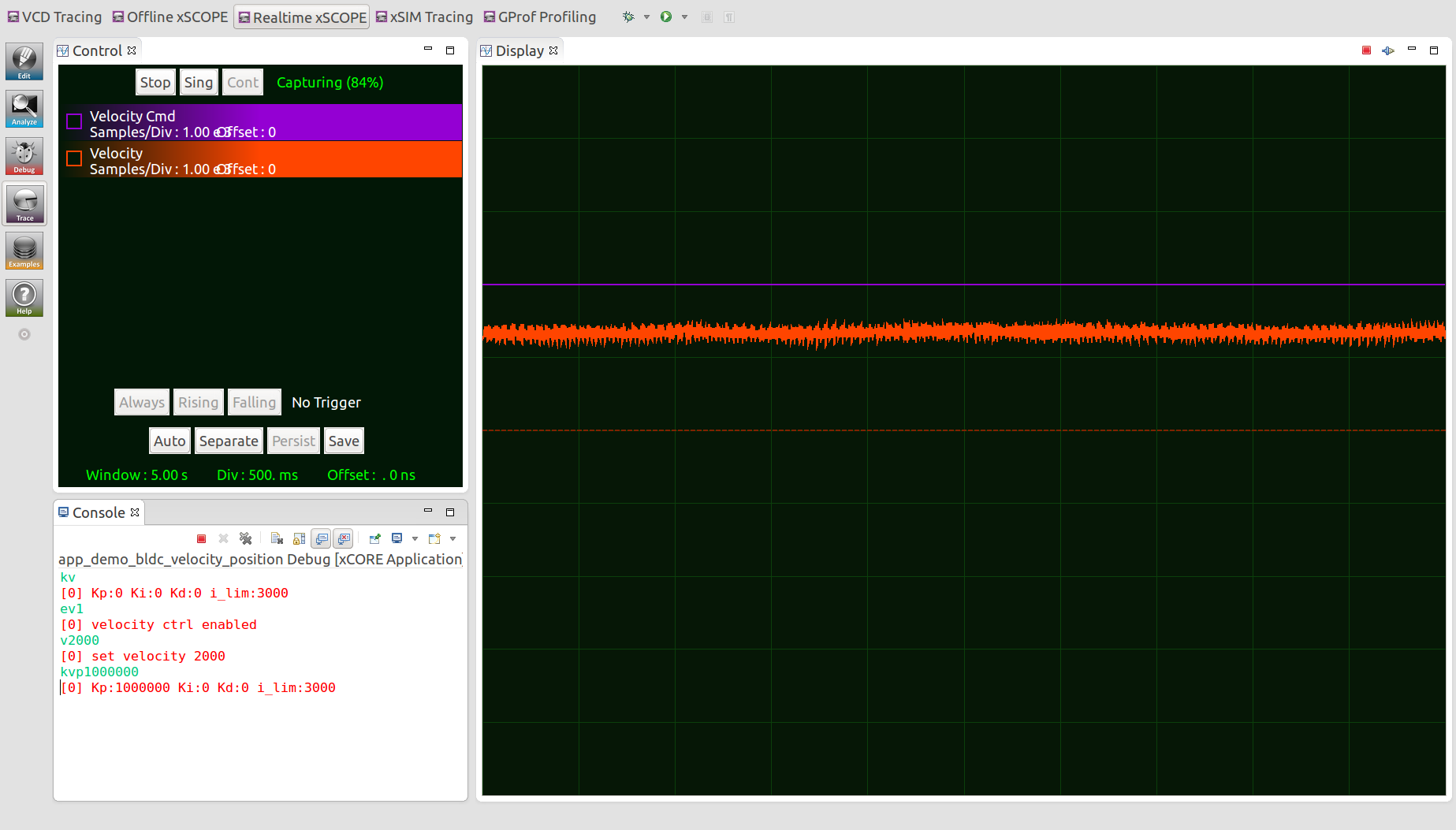
Fig. 2: increasing kP to increase the actual speed¶
From this step forth, step response of the system should be checked. Increase kI step by step to increase the speed of velocity controller (as a suggestion start with kI equal to 0.01 and in each step increase it by a factor of 2).
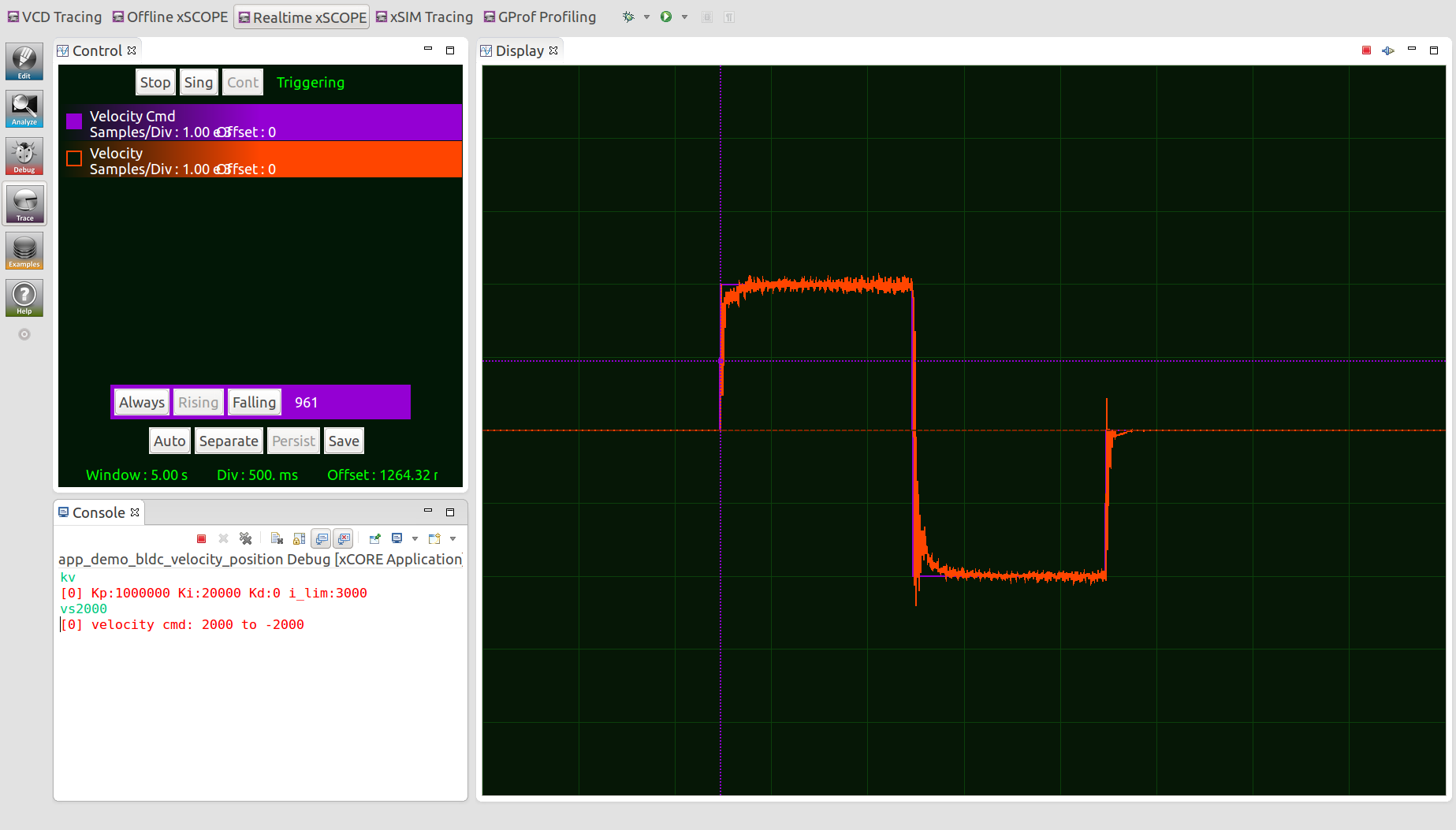
Fig. 3: Increasing kI until proper step response is generated by velocity controller¶
At this point, the parameters kP and kI of the velocity controller are tuned. The parameter kD of the velocity controller can be kept at its default value (0).
