- Hardware Manuals
- Commissioning and Tuning Guide
- Software Reference
- Resources
In Profile Position Mode a target position is applied to the trajectory generator. It is generating a position demand value for the position control loop taking into account the position limits. The trajectory generator computes the position demand internal value depending on the configured speed, starting acceleration and braking deceleration.

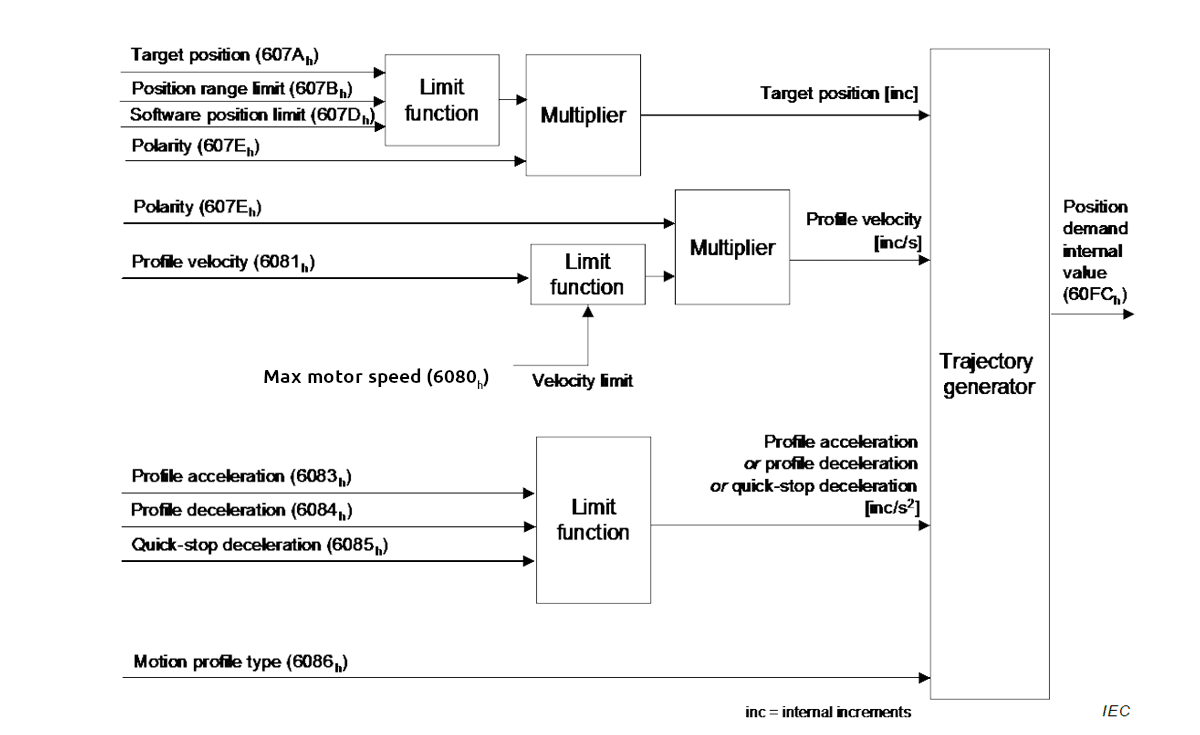
The trajectory generator receives the target position (0x607A), taking into account the position range limit (0x607B), the software position limit (0x607D), as well as the polarity (0x607E).
The velocity needs to be specified in object 0x6081, it is limited by the Max motor speed (0x6080).
The acceleration is calculated by the values:
Profile acceleration 0x6083
Profile deceleration 0x6084
The output of the trajectory generator is the position demand internal value for the position PID.
To enable the mode, the value 1 (0001h) must be entered in object 0x6060. The Op mode display 0x6061 can be used to check if the op mode has been set correctly.
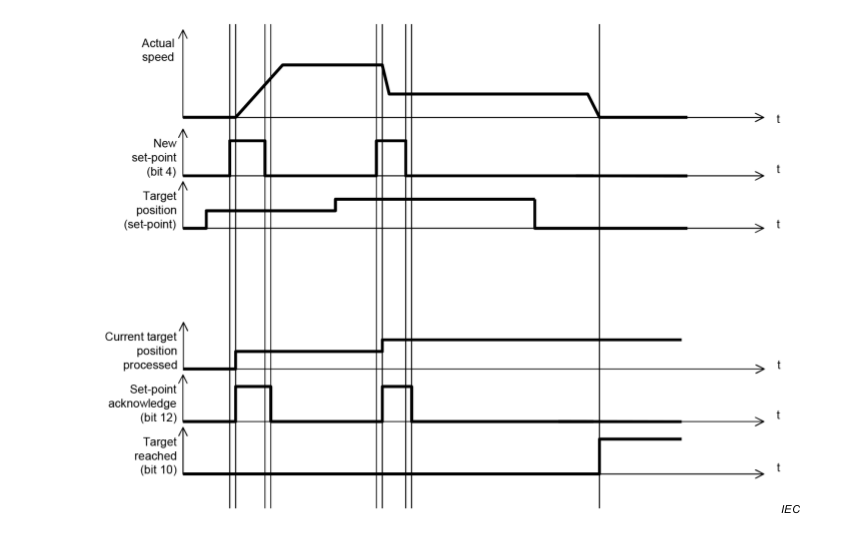
The setting of set-points is controlled by the timing of the new set-point bit in the controlword as well as the set-point acknowledge bit in the statusword.
After a set-point is applied to the drive device, the control device signals that the set-point is valid by a rising edge of the new set-point bit in the controlword. The drive device sets the set-point acknowledge bit in the statusword to 1, and afterwards, the drive device signals with the set-point acknowledge bit set to 0 its ability to accept new set-points.
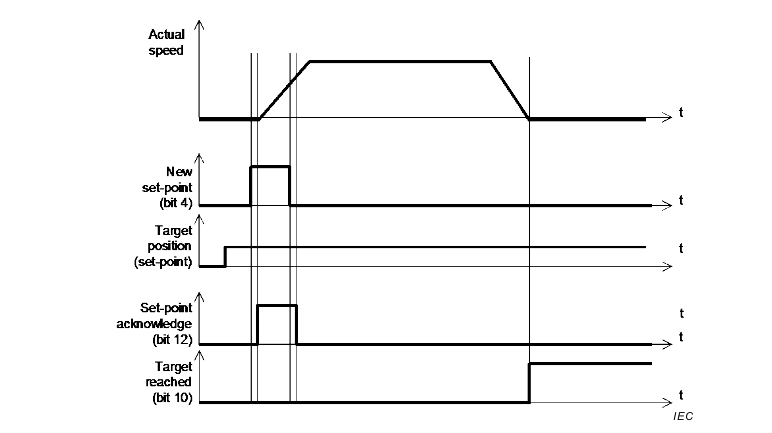
When a set-point is in progress and a new set-point is validated by the new set-point (bit 4) in the controlword, the new set-point is processed immediately. The handshaking procedure shown below is used for the single set-point method.